

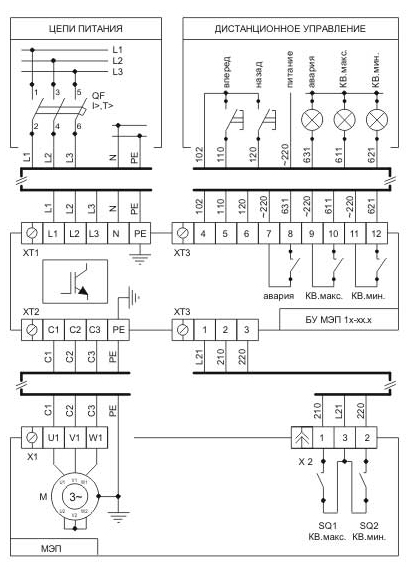
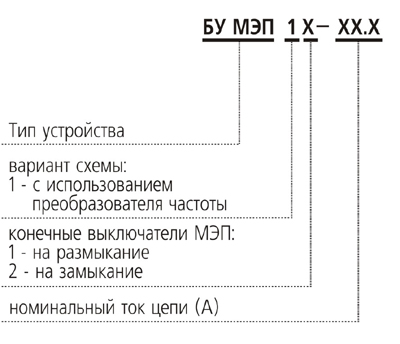
БУ МЭП 1х-хх,х
Блок управления обеспечивает:
- формирование выходного напряжения согласно с выбранным направлением перемещения;
- управляемый по времени запуск и останов механизма;
- контроль и отключение при превышении момента на валу ("быстрая" защита от заклинивания);
- обслуживание конечных выключателей механизма;
- местное и дистанционное управление;
- защиту приводного двигателя от короткого замыкания, перегрузки, неполнофазного режима работы;
- индикацию крайних положений механизма, формирование сигнализации удаленной системе автоматики.
Блок управления построен на базе преобразователя частоты производства Toshiba (Япония). Применение преобразователя частоты снижает динамические нагрузки на механизм, увеличивает коммутационную способность блока управления (количество коммутаций не ограничено).
|
Габаритные размеры навесного шкафа (ВхШхГ): 400x300x155 мм.
Каждое изделие обеспечивает регулировку номинального тока в диапазоне 0,1...1,0 от номинала для оптимальной настройки на конкретный механизм. |
 |
ДОПОЛНИТЕЛЬНЫЕ ВОЗМОЖНОСТИ
Преобразователь частоты, входящий в состав блока управления, обеспечивает следующие дополнительные функции:
Изменение скорости перемещения ВО МЭП.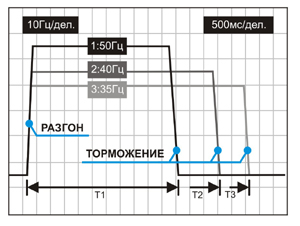 |
Скорость перемещения варьируется изменением частоты питания двигателя. По умолчанию частота питания составляет 50Гц, что соответствует паспортной скорости перемещения. При необходимости скорость может быть снижена путем уменьшения частоты питания двигателя. Рекомендованный диапазон изменения скорости 0,7.-10 (35...50Гц). Диаграммы 1...3 демонстрируют управление МЭП при изменении частоты питания в диапазоне (35...50Гц). |
|
Изменение времени разгона и торможения. ОБРАТИТЕ ВНИМАНИЕ! Плавное торможение может приводить к значительным перемещениям от конечного положения. В этом случае конечные выключатели должны быть установлены с некоторым упреждением. |
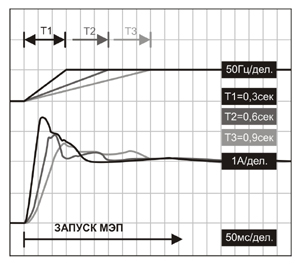 |
Останов при перегрузке по моменту.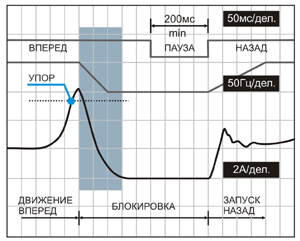 |
При наезде на упор, перегрузке или заклинивании механизма, преобразователь частоты останавливает двигатель в течение 50...150 мс (зависит от перегрузки и скорости движения) вне зависимости от состояния команд ВПЕРЕД / НАЗАД. Продолжение движения возможно при повторном формировании команд. Пауза перед повторной командой должна составлять не менее 200 мс. При помощи функции «останов при перегрузке по моменту» можно организовать работу МЭП без конечных выключателей. Функция также эффективна если в крайних точках работы механизма присутствует механический упор (челюстной захват, грейфер и т.п.) |